We use the Laerdal manikins and are generally very pleased with them. However, the voice can be problematic. Here are some of the issues:
- Sound goes crackly sometimes – it seems that the IP stream gets corrupted somehow. Restarting the Voice app fixes it, but this shouldn’t happen.
- There are so many volume controls! Novice users get confused about all the places to control volume/mute and it’s often difficult for the next person to work out what the previous person did.
- The Mic’s we had were pretty low quality.
My wife recently started a podcast, so I got to play with mics and other prosumer audio kit over the holidays.
Doni from Flindes AV/IDS found an old Digital Signal Processor sitting around unused and said I could use it for this project. It is a Biamp Nexia CS and has 10 mic/line inputs and 6 line outputs. Since this is a DSP, it is all computer configurable and you can mix/match all the inputs and outputs to get exactly what you want.

The idea was to get some nice’ish condenser mics (Audio Technica AT2020 $108), mount them on boom arms (Ikea Tertial desk lamps $15) and put a speaker under the bed to bypass the manikin voice channel completely. Since the DSP has so many channels and Sim1 and Sim2 are adjacent to each other, this device should be able to serve both rooms. Ideally this would serve both the Manikin voice channels, but also the room audio.


For each room, we would have:
- Mic in the control room (input) to a speaker under the bed (output) – with a mute switch
- Mic in the sim room (input) that feeds both a speaker in the control room (output) as well as the MLS audio encoder (different output)
So, that’s 2 inputs and 3 outputs per room = 6 outputs total, so this should work! I haven’t tackled the room mic channel yet – not sure if we could/should have echo cancellation on this channel. That will be another post.
For Sim3, we’ll run a Pre-Me ($111) as a preamp for the mic instead of the Nexia. When we get our new facility, we’ll get a big Tesira to run all of the sim rooms together.

In all cases, the speakers are driven by a simple auido amp – AA0472 $40 from Jaycar. The speakers (4″ indoor/outdoor $70 for the pair) are mounted under the backrest of the bed with some tek screws into the frame. The beds can be disconnected and moved around using a set of anderson connectors on the speaker cable near the foot of the bed with all of the other connections (power, data, air) to the manikin.



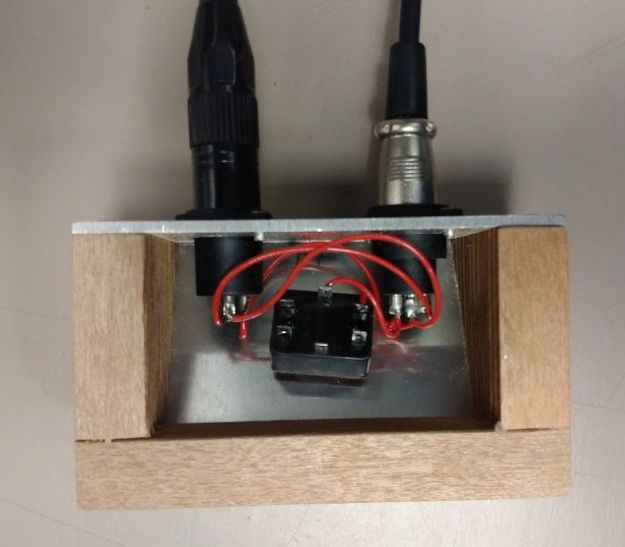
These mics all use balanced XLR connections and because they are condenser mics, phantom power. The general consensus on the mic muting is that shorting the two signal pins will provide good pop free muting and will not affect the phantom power which is applied between the signal wires and ground. So I whipped up a switch box for each room that is essentially a passthrough with a switch to short pins 2 and 3 (pin 1 is ground).
This new system is working great! Everyone loves it.